




















PROJECT プロジェクト
技術者の「腕」とロボットアームで、
成功へ導く。
PROJECT STORY #02
福島第一原子力発電所
ロボットアームによる堆積物調査
ロボットアームによる堆積物調査
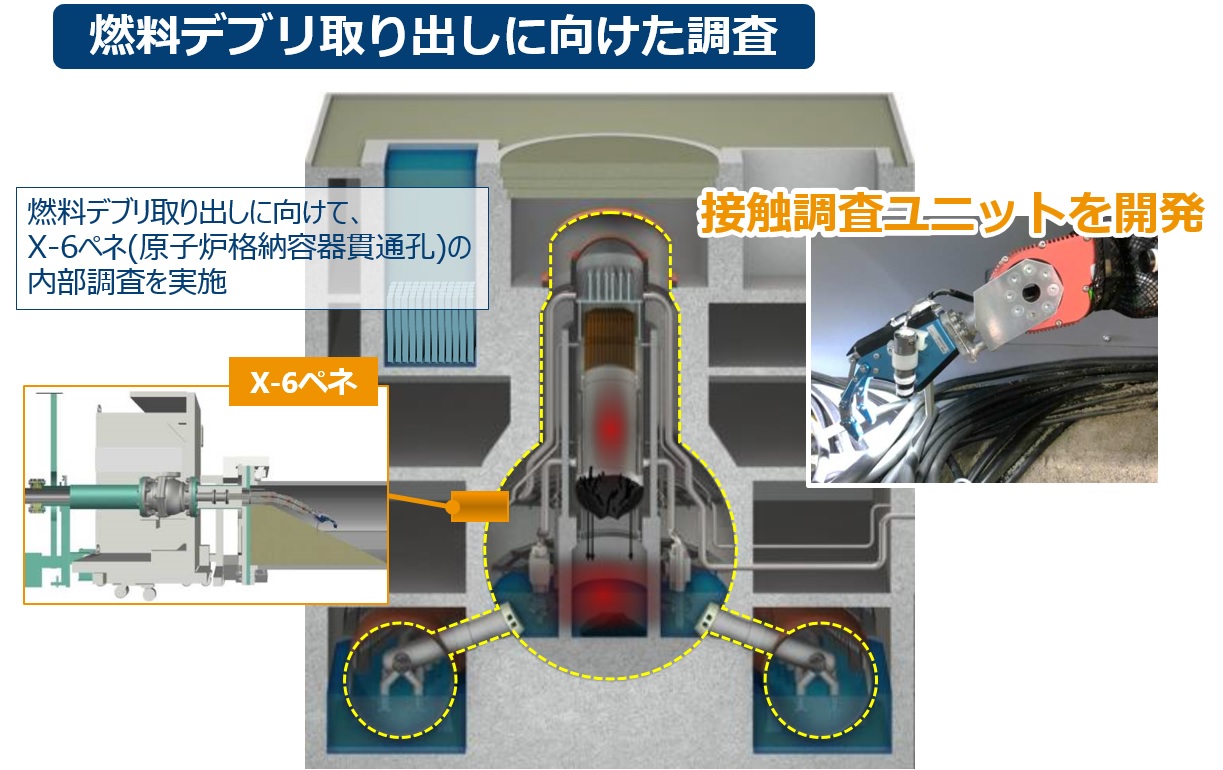
福島第一原子力発電所2号機。格納容器内に残る(※)燃料デブリ。その取り出しを妨げているのが、装置搬入路の堆積物だ。何が、どう堆積しているのか。廃炉を前進させるために不可欠な調査は、東京パワーテクノロジーに託された。
※2022年当時
TEAM MEMBER

機械保全第一グループ
2010年入社
電気科

廃炉工事部 機械設備第二グループ
2005年入社
工学部 機械工学科

廃炉工事部 機械設備第二グループ
2007年入社
機械科
廃炉作業、山場への助走。

2011年に発生した、福島第一原子力発電所の事故。非常用電源の喪失によって格納容器内の核燃料が過熱し、構造物の一部とともに溶け、やがて冷えて固まった。それを「燃料デブリ」と呼ぶ。2022年。燃料デブリは依然として格納容器内にあり、その取り出しは廃炉作業の山場とみられていた。
もちろん簡単にはいかない。燃料デブリを取り出すには、格納容器内へ装置を搬入する必要がある。唯一のルートは、「X-6ペネトレーション(X-6ペネ)」と呼ばれるトンネルのような孔。ところが厄介なことに、X-6ペネの内側にも事故に由来する堆積物がある。どんな性状のものが、どんなふうに分布しているのか。それがわからなければ動き出すことができないのだ。
堆積物の調査を託されたのが、東京パワーテクノロジーの菅波が率いるチームだった。実施したい調査は大きく2つ。堆積物に物理的な力をかける触診と、レーザーによる3次元スキャンだ。ただ、X-6ペネに調査機器を送り込むための貫通孔は、直径がたったの11.5センチしかない。どうしたものか。色々探している時に、展示会にて小さなロボットアームを見つけ、調べた結果、使えるかもしれないと思い、調整等の試行錯誤がはじまった。
ロボットアームの操作を極める。

「小さいなあ」。はるばる届いたロボットアームを前に、菅波は思わずつぶやいた。いや、小さいからこそ選んだのだが、イメージしていたより頼りなく見える。というのも、X-6ペネは精密機械にとって過酷な現場だ。きわめて高い湿度など、悪条件が重なっている。また、堆積物への触診を行うには、一定以上の「押す力」も備えていなければならない。チームはさっそくテストに取りかかった。X-6ペネの環境を再現し、実際に動かしてみる。たしかに非力な部分はあった。しかし、必要十分な調査ができそうだということもわかってきた。
ロボットアームの操作を任されたのは、ドイツで別のロボットアームを経験済みの藤田だ。遠隔操作なので、直接の目視はできない。カメラから送られてくるモニターの映像が頼りだ。藤田いわく「ゲームに近い」。だが、ゲームオーバーは絶対に許されない。ただでさえ高い難易度をさらに押し上げているのは、場所が場所だけに実地トレーニングが不可能なことだった。X-6ペネとその周辺を再現したモックアップで、藤田は練習に励んだ。ひたすら、トライ&エラーを繰り返すこと——何よりも重要な「操作感覚」を自分のものにするには、それしかない。
同時に、修正すべき点の洗い出しも同時に行っていった。たとえば、タッチパネル式のインターフェイス。タップ時のちょっとした力加減で緊急停止が起きてしまったことを受け、2つのボタンの同時押しでしかそれが起きないよう変更した。こうした改善を積み重ね、ミスの可能性を徹底的に排除していく。
前例のない作業。
一方で松本もまた、モックアップ内でのトレーニングに余念がなかった。松本の担当は、ロボットアームを送り込むためのガイドパイプやシリンダ、レールといった遠隔装置の設置と撤去。この作業がきわめてシビアなのは、放射性物質の拡散を防ぐ境界エリア=バウンダリに関わる点だった。遮蔽と被ばく低減を徹底することはもちろん、装置にもハイレベルな品質管理が求められる。それにも関わらず、東京パワーテクノロジーをはじめ、プラントメーカー以外がバウンダリに関わる作業を行った前例はない。リスクの抽出と潰し込みは確実か。万一が起きた場合、完璧に対処できるか。知見が乏しい中で、発注者である東京電力の厳しい基準をクリアしなければならない。松本は慎重に慎重を重ねた。それなのに——トラブルは降りかかった。
「入らない……」。よりによって現場での出来事だった。ロボットアームが装置にすんなり進入してくれない。モックアップでは、一度もそんなことは起きなかったというのに。やがて突き止められた原因は、「現場の床の傾き」。レーザーで測定してみると、目を疑うような数値が表示された。想定していたリスクを、現実が上回ってしまった。
協力会社を含め、関係者が総動員された。当初のスケジュールを維持することはすでに難しかったが、それでも遅れは最小限に抑えなければならない。大急ぎで修正方針を立て、東京電力の承認を得て装置に反映する。「大切なのは、これからどうしていくかということ」——東京電力側のそんな言葉に背中を押され、どうにか軌道修正をやりとげた。
詰めかけたギャラリーの前で。

調査当日。菅波、松本、藤田の3人は、それぞれの持ち場についた。現場を訪れたのはこの日を含めて数えるほどだが、モックアップでのトレーニングでイメージはできている。ただ練習と大きく違うのは、たくさんのギャラリーが詰めかけていたこと。東京電力はもちろん、関係する省庁やメーカーからの来客もあった。注目度の高さを改めて思い知り、3人の緊張も高まる。
ロボットアームは、一発で装置への進入を果たした。胸をほっと撫で下ろす松本。藤田の操作で、アームがゆっくりと動き出す。モニターの映像を頼りに3本のフィンガが開かれ、堆積物の表面に押し当てられる。順調だ。それでも時折、確認や調整のためにロボットアームが止まることがある。トラブルというわけではないのだが、そのたびに菅波はヒヤリとした。再び動き出すまでの時間が、やけに長く感じられる。そんなとき、あくまでも冷静な藤田の姿が頼もしい。
やがて、予定していた調査のすべてがとどこおりなく終わった。ロボットアームの帰還を眺めながら、菅波は喉がカラカラに乾いていることに気づいた。入社15年超のベテランでさえ、心身をそこまで張り詰めさせるほどのプロジェクトだったのだ。
始まりの、始まり。

調査の無事完了を見届けて、菅波がまず電話した先は協力会社だった。「うまくいったよ」。菅波の報告に、電話口の向こうも喜んでいる。「このプロジェクトは、地元の協力会社なしには成立しなかった」。菅波たち3人は、そう口を揃える。ロボットアームの調達に始まり、装置の設計・開発はすべてが協力会社との協働によるものだからだ。プロジェクトは、東京電力グループ初のバウンダリに関する作業として、東京電力から表彰を受けた。そのことで、かけがえのない協力会社にもスポットライトが当たったのが、何よりも嬉しかった。
福島第一原子力発電所における廃炉作業は、これからさらに加速していくことが予定されている。高線量・高汚染が前提の現場である以上、ロボットや装置はますます重宝されるだろう。一方で、予測できない状況のもと、壁にぶつかることも増えていくはずだ。そんなとき、今回の挑戦で手に入れた知見が、必ず役に立つ。「始まりの始まり」。このプロジェクトを、菅波はそう表現している。